写在前面
自适应神经网络控制器将自适应控制与神经网络相结合,通过神经网络系统辨识的方法达到自适应控制的目的。
控制器针对系统模型参数未知的被控对象,基于系统的状态变量,通过神经网络辨识被控对象的未知参数,并将被控对象的模型信息提供给自适应反馈控制器。相对于传统的PID控制器,自适应神经网络控制器有更强的鲁棒性。
问题描述
考虑一个含有未知函数的非线性系统,其状态方程可表示为
{ x ˙ = f ( x ) + P u y = x ( 1 ) \left\{
\begin{aligned}
\dot x&=f(x)+Pu\\
y&=x
\end{aligned}
\right.\qquad (1)
{ x ˙ y = f ( x ) + P u = x ( 1 )
其中x , y ∈ R m x,y\in\mathbb R^m x , y ∈ R m u ∈ R m u\in\mathbb R^m u ∈ R m f ( x ) f(x) f ( x ) P ∈ R m × m P\in\mathbb R^{m\times m} P ∈ R m × m
控制目标是使系统输出变量y y y y d y_d y d
自适应神经网络控制器
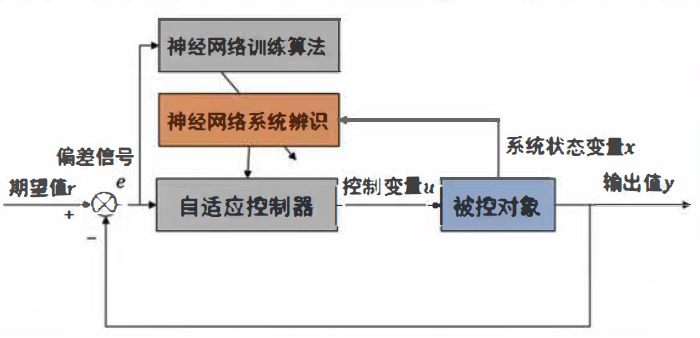
神经网络反馈自适应控制器的结构如下图所示。
RBF神经网络
首先定义跟踪误差 e e e
e = y − y d ( 2 ) e=y-y_d\qquad (2)
e = y − y d ( 2 )
对(2)求导,得
e ˙ = P ( P − 1 ( f ( x ) − y ˙ d ) + u ) ( 3 ) \dot e = P\left(P^{-1}(f(x)-\dot y_d)+u\right)\qquad (3)
e ˙ = P ( P − 1 ( f ( x ) − y ˙ d ) + u ) ( 3 )
考虑P − 1 ( f ( x ) − y ˙ d ) P^{-1}(f(x)-\dot y_d) P − 1 ( f ( x ) − y ˙ d ) Z = [ x , y ˙ d ] Z=[x,\dot y_d] Z = [ x , y ˙ d ] RBF神经网络 (Radial basis function neural networks)逼近(1)中的未知函数:
W ∗ T S ( Z ) + δ ( Z ) = P − 1 ( f ( x ) − y ˙ d ) ( 4 ) W^{*T}S(Z)+\delta(Z)=P^{-1}(f(x)-\dot y_d)\qquad (4)
W ∗ T S ( Z ) + δ ( Z ) = P − 1 ( f ( x ) − y ˙ d ) ( 4 )
其中,S ∈ R m S\in\mathbb R^m S ∈ R m W ∗ ∈ R m × m W^*\in\mathbb R^{m\times m} W ∗ ∈ R m × m ∥ W ∥ F ≤ W m \|W\|_F\leq W_{m} ∥ W ∥ F ≤ W m δ ∈ R m \delta\in\mathbb R^m δ ∈ R m ∥ δ ∥ ≤ δ m \|\delta\|\leq \delta_m ∥ δ ∥ ≤ δ m δ \delta δ
定义W ∗ W^* W ∗ W ^ \hat W W ^ 权值估计误差 W ~ = W ^ − W ∗ \tilde W=\hat W-W^* W ~ = W ^ − W ∗
e ˙ = P ( W ∗ T S ( Z ) + δ ( Z ) + u ) ( 5 ) \dot e=P(W^{*T}S(Z)+\delta(Z)+u)\qquad (5)
e ˙ = P ( W ∗ T S ( Z ) + δ ( Z ) + u ) ( 5 )
构造控制器为
u = − k e − W ^ T S ( Z ) ( 6 ) u=-ke-\hat W^TS(Z)\qquad (6)
u = − k e − W ^ T S ( Z ) ( 6 )
将(6)代入(5)得
e ˙ = P [ − k e − W ~ T S ( Z ) + δ ( Z ) ] ( 7 ) \dot e=P[-ke-\tilde W^TS(Z)+\delta(Z)]\qquad (7)
e ˙ = P [ − k e − W ~ T S ( Z ) + δ ( Z ) ] ( 7 )
神经网络训练
为了使权值W ^ \hat W W ^ W ∗ W^* W ∗ W ^ \hat W W ^ W ^ \hat W W ^
将跟踪误差和权值估计误差作为李雅普诺夫函数的自变量,构建函数如下
V = 1 2 e T P − 1 e + 1 2 tr ( W ~ T Γ − 1 W ~ ) ( 8 ) V=\frac{1}{2}e^TP^{-1}e+\frac{1}{2}\operatorname{tr}(\tilde W^T\Gamma^{-1}\tilde W)\qquad (8)
V = 2 1 e T P − 1 e + 2 1 t r ( W ~ T Γ − 1 W ~ ) ( 8 )
其中Γ \Gamma Γ
V ˙ = − k e T e − S T ( Z ) W ~ e + tr ( W ~ T Γ − 1 W ~ ˙ ) + δ ( Z ) e \dot V=-ke^Te-S^T(Z)\tilde We+\operatorname{tr}(\tilde W^T\Gamma^{-1}\dot{\tilde W})+\delta(Z)e
V ˙ = − k e T e − S T ( Z ) W ~ e + t r ( W ~ T Γ − 1 W ~ ˙ ) + δ ( Z ) e
由于W ~ = W ^ − W ∗ \tilde W=\hat W-W^* W ~ = W ^ − W ∗ W ^ ˙ = W ~ ˙ \dot {\hat W}=\dot {\tilde W} W ^ ˙ = W ~ ˙
V ˙ = − k e T e − S T ( Z ) W ~ e + tr ( W ~ T Γ − 1 W ^ ˙ ) + δ ( Z ) e \dot V=-ke^Te-S^T(Z)\tilde We+\operatorname{tr}(\tilde W^T\Gamma^{-1}\dot {\hat W})+\delta(Z)e
V ˙ = − k e T e − S T ( Z ) W ~ e + t r ( W ~ T Γ − 1 W ^ ˙ ) + δ ( Z ) e
由于
S ( Z ) W ~ e = tr ( e S T ( Z ) W ~ ) S(Z)\tilde We=\operatorname{tr}(eS^T(Z)\tilde W)
S ( Z ) W ~ e = t r ( e S T ( Z ) W ~ )
则
V ˙ = − k e T e + tr ( − e S T ( Z ) W ~ + W ^ ˙ T Γ − 1 W ~ ) + δ ( Z ) e ( 9 ) \dot V=-ke^Te+\operatorname{tr}(-eS^T(Z)\tilde W+\dot {\hat W}^T\Gamma^{-1}\tilde W)+\delta(Z)e\qquad (9)
V ˙ = − k e T e + t r ( − e S T ( Z ) W ~ + W ^ ˙ T Γ − 1 W ~ ) + δ ( Z ) e ( 9 )
自适应律之一
稳定性要求V ˙ ≤ 0 \dot V\leq 0 V ˙ ≤ 0 − S T ( Z ) W ~ e -S^T(Z)\tilde We − S T ( Z ) W ~ e tr ( W ~ T Γ − 1 W ^ ˙ ) \operatorname{tr}(\tilde W^T\Gamma^{-1}\dot {\hat W}) t r ( W ~ T Γ − 1 W ^ ˙ ) k k k k ≥ δ m ∥ e ∥ k\geq\frac{\delta_m}{\|e\|} k ≥ ∥ e ∥ δ m
V ˙ = − k e T e + δ ( Z ) e ≤ − k ∥ e ∥ 2 + δ ∗ ∥ e ∥ = − ( k − δ ∗ ∥ e ∥ ) ∥ e ∥ 2 ≤ 0. \dot V=-ke^Te+\delta(Z)e\leq -k\|e\|^2+\delta^*\|e\|=-(k-\frac{\delta^*}{\|e\|})\|e\|^2\leq 0.
V ˙ = − k e T e + δ ( Z ) e ≤ − k ∥ e ∥ 2 + δ ∗ ∥ e ∥ = − ( k − ∥ e ∥ δ ∗ ) ∥ e ∥ 2 ≤ 0 .
此时神经网络的权值自适应更新律为
W ^ ˙ = Γ S ( Z ) e ( 10 ) \dot {\hat W}=\Gamma S(Z)e\qquad (10)
W ^ ˙ = Γ S ( Z ) e ( 1 0 )
相应∥ e ∥ \|e\| ∥ e ∥ δ m / k \delta_m/k δ m / k W ~ = W ^ − W ∗ \tilde W=\hat W-W^* W ~ = W ^ − W ∗ 未知上界有界 (Unknown Upper Bound, UUB)问题。
自适应律之二
取自适应律为
W ^ ˙ = Γ S ( Z ) e − k 1 Γ W ^ ( 11 ) \dot {\hat W}=\Gamma S(Z)e-k_1\Gamma\hat W\qquad (11)
W ^ ˙ = Γ S ( Z ) e − k 1 Γ W ^ ( 1 1 )
将(11)代入(9)得
V ˙ = − k e T e − k 1 tr ( W ^ T W ~ ) + δ ( Z ) e \dot V=-ke^Te-k_1\operatorname{tr}(\hat W^T\tilde W)+\delta(Z)e
V ˙ = − k e T e − k 1 t r ( W ^ T W ~ ) + δ ( Z ) e
为了比较真实的矩阵和估计的矩阵值之间的误差,或者说比较真实矩阵和估计矩阵之间的相似性,我们可以采用 Frobenius 范数 。根据F范数的性质,有
2 tr ( W ^ T W ~ ) = ∥ W ^ ∥ F 2 + ∥ W ~ ∥ F 2 − ∥ W ∗ ∥ F 2 ≥ ∥ W ~ ∥ F 2 − W m 2 tr ( W ^ T W ~ ) ≥ ∥ W ~ ∥ F 2 − ∥ W ~ ∥ ∥ W ∗ ∥ F ≥ ∥ W ~ ∥ F 2 − ∥ W ~ ∥ F W m \begin{aligned}
2\operatorname{tr}(\hat W^T\tilde W)&= \|\hat W\|_F^2+\|\tilde W\|_F^2-\|W^*\|_F^2\geq \|\tilde W\|_F^2-W_m^2\\
\operatorname{tr}(\hat W^T\tilde W)&\geq \|\tilde W\|_F^2-\|\tilde W\|\|W^*\|_F\geq \|\tilde W\|_F^2-\|\tilde W\|_FW_m
\end{aligned}
2 t r ( W ^ T W ~ ) t r ( W ^ T W ~ ) = ∥ W ^ ∥ F 2 + ∥ W ~ ∥ F 2 − ∥ W ∗ ∥ F 2 ≥ ∥ W ~ ∥ F 2 − W m 2 ≥ ∥ W ~ ∥ F 2 − ∥ W ~ ∥ ∥ W ∗ ∥ F ≥ ∥ W ~ ∥ F 2 − ∥ W ~ ∥ F W m
则
V ˙ ≤ − k e T e − k 1 ( ∥ W ~ ∥ F 2 − ∥ W ~ ∥ F W m ) + δ ( Z ) e ≤ − [ ∥ e ∥ ∥ W ~ ∥ F ] [ k 0 0 k 1 ] [ ∥ e ∥ ∥ W ~ ∥ F ] + [ δ m k 1 W m ] [ ∥ e ∥ ∥ W ~ ∥ F ] ( 12 ) \begin{aligned}
\dot V&\leq -ke^Te-k_1(\|\tilde W\|_F^2-\|\tilde W\|_FW_m)+\delta(Z)e\\
&\leq-\begin{bmatrix}\|e\|&\|\tilde W\|_F\end{bmatrix}\begin{bmatrix}k&0\\ 0&k_1\end{bmatrix}\begin{bmatrix}\|e\|\\ \|\tilde W\|_F\end{bmatrix}
+\begin{bmatrix}\delta_m&k_1W_m\end{bmatrix}\begin{bmatrix}\|e\|\\ \|\tilde W\|_F\end{bmatrix}
\end{aligned}\qquad (12)
V ˙ ≤ − k e T e − k 1 ( ∥ W ~ ∥ F 2 − ∥ W ~ ∥ F W m ) + δ ( Z ) e ≤ − [ ∥ e ∥ ∥ W ~ ∥ F ] [ k 0 0 k 1 ] [ ∥ e ∥ ∥ W ~ ∥ F ] + [ δ m k 1 W m ] [ ∥ e ∥ ∥ W ~ ∥ F ] ( 1 2 )
令z = [ ∥ e ∥ ∥ W ~ ∥ F ] T z=\begin{bmatrix}\|e\|&\|\tilde W\|_F\end{bmatrix}^T z = [ ∥ e ∥ ∥ W ~ ∥ F ] T
V ˙ ≤ − z T Q z + h z ≤ − λ ‾ ( Q ) ∥ z ∥ 2 + ∥ h ∥ ∥ z ∥ ( 13 ) \dot V\leq -z^TQz+hz\leq -\underline \lambda(Q)\|z\|^2+\|h\|\|z\|\qquad (13)
V ˙ ≤ − z T Q z + h z ≤ − λ ( Q ) ∥ z ∥ 2 + ∥ h ∥ ∥ z ∥ ( 1 3 )
令
{ R ‾ = min ( λ ‾ ( P − 1 ) , λ ‾ ( Γ − 1 ) ) R ‾ = max ( λ ‾ ( P − 1 ) , λ ‾ ( Γ − 1 ) ) \left\{\begin{aligned}
\underline R&=\min(\underline \lambda(P^{-1}),\underline \lambda(\Gamma^{-1}))\\
\overline R&=\max(\overline \lambda(P^{-1}),\overline \lambda(\Gamma^{-1}))
\end{aligned}\right.
{ R R = min ( λ ( P − 1 ) , λ ( Γ − 1 ) ) = max ( λ ( P − 1 ) , λ ( Γ − 1 ) )
则
1 2 R ‾ ∥ z ∥ 2 ≤ V ≤ 1 2 R ˉ ∥ z ∥ 2 ( 14 ) \frac{1}{2}\underline R\|z\|^2\leq V\leq \frac{1}{2}\bar R\|z\|^2\qquad (14)
2 1 R ∥ z ∥ 2 ≤ V ≤ 2 1 R ˉ ∥ z ∥ 2 ( 1 4 )
结合(13)、(14)得到
V ˙ ≤ − α V + β V ( 15 ) \dot V\leq -\alpha V+\beta \sqrt{V}\qquad (15)
V ˙ ≤ − α V + β V ( 1 5 )
其中
α = 2 λ ‾ ( Q ) R ‾ , β = 2 ∥ h ∥ R ‾ \alpha = \frac{2\underline \lambda(Q)}{\overline R},\quad \beta=\frac{\sqrt{2\|h\|}}{\sqrt{\underline R}}
α = R 2 λ ( Q ) , β = R 2 ∥ h ∥
对(15)积分可得
V ( t ) ≤ V ( 0 ) e − α 2 t + β α ( 1 − e − α 2 t ) \sqrt{V(t)}\leq \sqrt{V(0)}e^{-\frac{\alpha}{2}t}+\frac{\beta}{\alpha}(1-e^{-\frac{\alpha}{2}t})
V ( t ) ≤ V ( 0 ) e − 2 α t + α β ( 1 − e − 2 α t )
可保证∥ e ∥ , ∥ W ~ ∥ F \|e\|,\|\tilde W\|_F ∥ e ∥ , ∥ W ~ ∥ F
lim t → ∞ ∥ e ∥ ≤ ∥ h ∥ R ‾ λ ‾ ( Q ) R ‾ λ ‾ ( P − 1 ) \lim_{t\to\infty} \|e\|\leq \frac{\|h\|\overline R}{\underline \lambda(Q)\sqrt{\underline R \underline \lambda (P^{-1})}}
t → ∞ lim ∥ e ∥ ≤ λ ( Q ) R λ ( P − 1 ) ∥ h ∥ R
相比传统的PID控制器, 自适应控制器能修正自己的特性以适应对象和扰动的动态特性的变化 , 因此对模型复杂多变被控对象,自适应神经网络控制算法具有更高的可靠性。