写在前面
原论文标题:Timescale Separation in Autonomous Optimization.
本文为近期阅读的论文(Hauswirth 2020)和其前作(Menta 2018)的笔记。该论文研究如图1所示互连反馈系统的稳定性,实际上通过timescale separation假设,直接将物理系统的稳态代入了优化部分,优化部分相当于并未用到状态x的反馈。
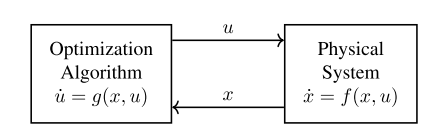
图1. 互连反馈系统
问题描述
这里以线性系统为例。考虑线性时不变(LTI)系统
x˙=Ax+Bu+Qw(1)
其中,x∈Rn,u∈Rp,w∈Rq。
假设1: 存在正定矩阵P∈Rn×n,使得ATP+PA≤−In。
在假设1下,系统(1)指数稳定,A可逆,则对固定的u和w,其稳态为x=Ku+Rw,其中K:=−A−1B∈Rn×p,R:=−A−1Q∈Rn×q。
考虑稳态输出和控制量的优化问题
x,umins.t.Φ(x,u)x=Ku+Rw,(2)
消除约束,转化为无约束优化问题minuΦ~(u),其中Φ~(u):=Φ(Ku+Rw,u)。根据链式法则(chain rule),有
∇Φ~(u):=HT∇Φ(Ku+Rw,u),
其中,HT:=[KT,In]。
综上所述,给出如下互连系统
x˙u˙=Ax+Bu+Qw,=−αHT∇Φ(x,u)。(3)
对优化问题min{Φ(x)∣x∈Ω},其中Φ:Rn→R连续可微,点x∗称为critial,如果它满足一阶最优条件(KKT条件),即x∗∈Ω且−∇Φ(x∗)∈NΩ(x∗),其中NΩ(x):={v∈Rn∣vT(y−x)≤0,∀y∈Ω}。
若Ω={x∈Rn∣h(x)=0,g(x)≤0},其中h:Rn→Rs,g:Rn→Rr,后一个条件等价于存在λ∈Rs,μ∈R+r使得
∇Φ(x∗)+∇h(x∗)Tλ+∇g(x∗)Tμ=0
以及μigi(x∗)=0对所有i=1,⋯,r成立。
试问,互连系统(3)能否将系统(1)控制到优化问题(2)的critical point?
最优性分析
这里首先分析一下互连系统(3)的平衡点是否为优化问题(2)的critical point。
命题1: 优化问题(2)每一个极小值(minimizer)都是互连系统(3)的一个平衡点。反之,互连系统(3)的每一个平衡点都是优化问题(2)的一个critical point。
原论文假设线性无关规范满足,因此KKT条件是局部极小值(local minimizer)的必要条件,可以直接给定local minimizer推导到平衡点。但是无法通过平衡点推导到local minimizer,只能推导到critical point。
给定critical point(x∗,u∗),满足x∗=Ku∗+Rw和∇Φ(x∗,u∗)+[In,−K]Tλ=0。
注意到[In,−K]H=0,因此HT∇Φ(x∗,u∗)=0,(x∗,u∗)是互连系统(3)的一个平衡点。
反之,给定平衡点(x∗,u∗),有x∗=Ku∗+Rw,且∇Φ(x∗,u∗)∈kerHT=imH⊥。由于imH⊥由[In,−K]T展开,因此∇Φ(x∗,u∗)+[In,−K]Tλ=0。故(x∗,u∗)也是critical point。
稳定性分析
假设2: Φ~(u)有l−Lipschitz的梯度(gradient)。即∥HT(∇Φ(x,u)−∇Φ(x′,u))∥≤l∥x−x′∥。此外,Φ~(u)的子水平集(sublevel set)是紧集。
如果只知道∇Φ(x,u)的lipschitz常数L,则取l:=L∥K∥可满足条件。
定理1: 在假设1、2下,每当满足
α<α∗:=2lβ1(4)
时,互连系统(3)收敛到优化问题(2)的critical point,其中β:=∥PK∥。此外,只有优化问题(5)的严格local minimizer才是渐进稳定的。
由定理1可以得到,如果优化问题(2)进一步是凸的,那么互连系统(3)收敛到其全局最优解的集合。
我们将定理1的证明分为三个部分。 首先,我们提出了一个LaSalle函数,只要验证了(4),该函数沿系统的轨迹就不会增加(non-increasing)。 其次,我们应用LaSalle的不变性原理并得出结论,所有轨迹都收敛到满足(2)的一阶最优性条件的点集。 第三,我们证明只有(3)的极小值可以渐近稳定。
LaSalle函数
由singular perturbation analysis启发,定义如下函数
Zδ(x,u)=(1−δ)V(u)+δW(x,u),(5)
其中0<δ<1是一个凸组合系数,且
V(u)W(x,u):=Φ(Ku+Rw,u),:=(x−Ku−Rw)TP(x−Ku−Rw)。
引理1: Zδ(x,u)沿着(3)的李导数满足
Z˙δ(x,u)≤[∥ψ∥∥ϕ∥]Λ[∥ψ∥∥ϕ∥],
其中
ψ(x,u)ϕ(x,u):=HT∇Φ(x,u),:=x−Hu−Rw,
以及
Λ:=[−α(1−δ)2α(l(1−δ)+δβ)2α(l(1−δ)+δβ)−2δ]。(6)
引理2: 考虑(6)中的Λ,每当α满足(4),那么对一些δ∗∈(0,1),Λ≤0。
定理1、2证明了Zδ∗(x,u)在条件(4)下不会增加。下面需要证明Z˙δ∗(x,u)的zero set中的点是否为平衡点,如果是,进一步证明集合的不变性。
不变性原理
以下引理均在α满足(4),δ∗按定理2中定义的条件下给出。
引理3: Z˙δ∗≤0对所有(x,u)成立,Z˙δ∗(x,u)=0当且仅当(x,u)∈E,其中
E={(x,u)∣x=Ku+Rw,∇Φ(x,u)∈kerHT}。
此外,E中的每一个点都是一个平衡点。
显然,当Z˙δ∗(x,u)=0时,∥ψ∥和∥ϕ∥都是0,即(x,u)∈E。而∥ψ∥和∥ϕ∥为0定义上就是平衡点,所以E本身就是平衡点的集合。
引理4: Zδ∗(x,u)的子水平集(sublevel set)对于互连系统(3)是紧集和正不变集。
注意:如果V(u)≤c的子水平集是紧集,那么存在U使得∥u∥≤U。
由于W(x,u)≥0,故Zδ∗(x,u)≤c是紧的意味着V(u)≤c是紧的。由假设2知,后者确实是紧的,所以∥u∥≤U满足。又由于V(u)有下界L,W(x,u)≤c−L。因为P正定,所以x同样有界。
正不变性由Zδ∗(x,u)的非增性保证。
Theorem (LaSalle’s Invariance Principle). Let Ω⊂D⊂Rn be a compact set that is positively invariant with respect to an autonomous system η˙=F(η), where F is locally Lipschitz. Let Z:D→R be a continuously differentiable function such that Z˙(η)≤0 in Ω. Let E be the set of all the points in Ω where Z˙(η)=0. Let M be the largest invariant set in E. Then every solution starting in Ω approaches M as t→∞.
因此,轨迹收敛到critical point的集合E。
严格极小值的渐进稳定性
假设z∗:=(x∗,u∗)是系统(3)的一个渐进稳定平衡点。则z∗∈Z:={(x,u)∣x=Ku+Rw}。
考虑reduced system
u˙=−αHT∇Φ(Ku+Rw,u)。(7)
在z∗的一个邻域内,起始于z0,系统(3)和(7)的轨迹均收敛于z∗,记为z(t)和z′(t)。区别在于,z′(t)永远在Z内部,而z(t)可能先出去再回来。
同时,对于(7),Φ在其轨迹z′(t)上非增,因此Φ(z∗)≤Φ(z0)。因为是z0任意的,所以z∗是局部极小值。
假设存在zˉ使得Φ(zˉ)≤Φ(z∗)。令z0=zˉ,系统(3)的轨迹z(t)收敛于z∗,∇Φ~(u(t))=0对几乎所有t≥0恒成立。这与z∗渐进稳定矛盾。所以渐近稳定点如果存在,必为严格极小值。