机械臂协同搬运中的内力建模
写在前面
上一篇文章(机械臂协同搬运中的阻抗控制)有一点遗留部分没有讲,即内力应该如何建模。我们知道,在抓持矩阵的零空间里,即。如何选取一个有实际物理意义的模型,同时能够满足前述等式约束呢?这篇文章就会介绍一个virtual linkage模型[1]来表示搬运物体的内力。
virtual linkage模型
考虑如图1所示的多机械臂搬运场景。
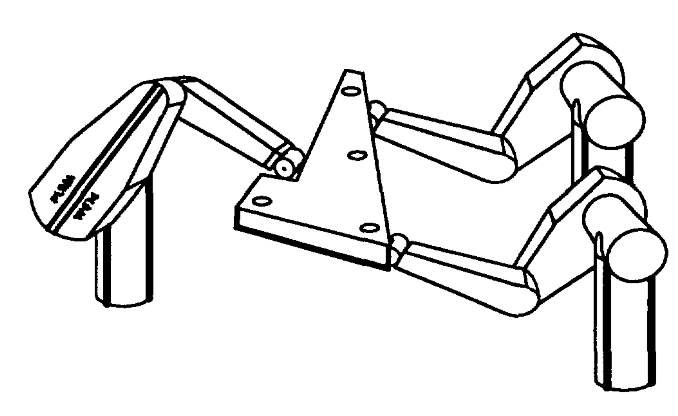
图1. 多机械臂搬运场景
我们定义virtual linkage的运动学结构为接触点相互连结的3个主动(actuated)的棱柱关节,其中接触点处为被动(passive)的回转关节,它们形成一个闭链(closed-chain),如图2所示。
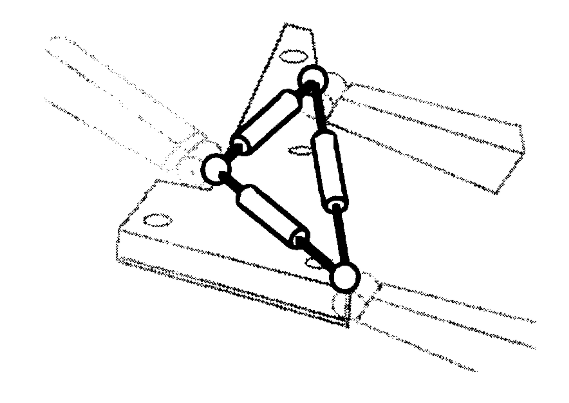
图2. virtual linkage结构
内力可以表示为棱柱关节上所作用的力。一般的,对任意virtual linkage,如果它的接触点有个,那么需要个棱柱关节。
内力的计算
假设接触点仅受到力作用。令为沿着某一个link从接触点到接触点的单位向量,令为物体上某一参考点到接触点的向量,如图3所示。
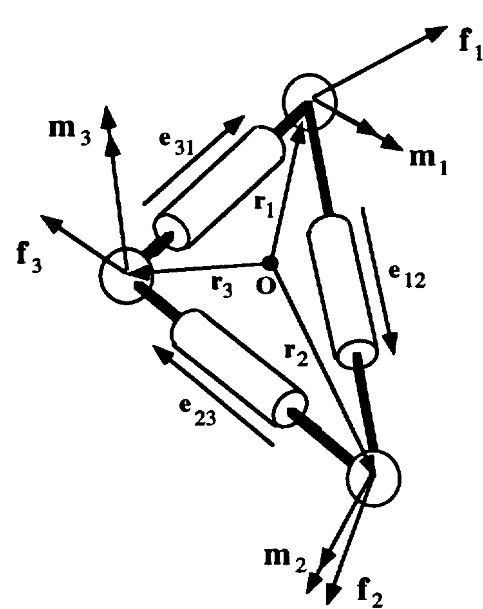
图3. virtual linkage力分析
定义为施加到接触点上的力,则。定义,满足
其中
定义上外力不产生内力,故,,其中为的左逆。
物体的合力和合力矩为
其中
注意:
- 我在前加了负号,因为按图3的定义是由接触点作用于机械臂末端的力,而是机械臂末端作用于接触点的力,二者方向相反。
- 按照上面定义的方向,当时,物体受到压力,此时反作用力的方向与中的向量同向。
- 这里的和均为时变的,所以每次计算都要更新和。
- 这里假设抓持点固定,所以和虽然时变,但是仍满足刚体运动性质(向量模不变)。
- 位于的零空间,即。
两个机械臂搬运实例
下面我们将virtual linkage应用到两个机械臂搬运任务中,如图4所示。
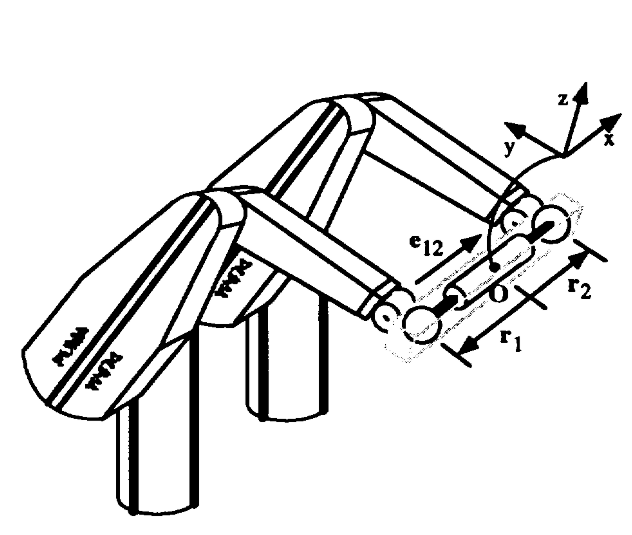
图4. 两个机械臂搬运任务
我们可以写出施加的力和内力之间的关系
其中。
这里将物体对接触点产生的反作用力建模为弹簧模型。令实际接触点位置为、,有如下关系
反过来已知、,可由计算得到
MATLAB代码如下:
%% contact positions
x0 = [-1,1.5,0;
0,1.5,0];
%% object position
Xo = [sum(x0)/size(x0,1),0,0,0];
%% displacements
ro= x0-Xo(1:3);
r = @(Xo,i) (SO3.rpy(Xo(4:6))*ro(i,:)')';
%% object impedance
Mo = blkdiag(obj.mass*eye(3),obj.inertia);
Co = @(dXo) [-obj.mass*g';skew(dXo(4:6))*obj.inertia*dXo(4:6)'];
G = @(Xo) [eye(3),eye(3);
skew(r(Xo,1)),skew(r(Xo,2))];
%% virtual linkage
e12 = @(Xo) (r(Xo,2)-r(Xo,1))/norm(r(Xo,1)-r(Xo,2));
E = @(Xo) [-e12(Xo),e12(Xo)]';
% modeled as a spring
Kpe = 1;
f12 = @(x) Kpe*(norm(x(1,:)-x(2,:))-norm(ro(1,:)-ro(2,:)));
Fint = @(Xo) (E(Xo)*f12(x))';
%% command force
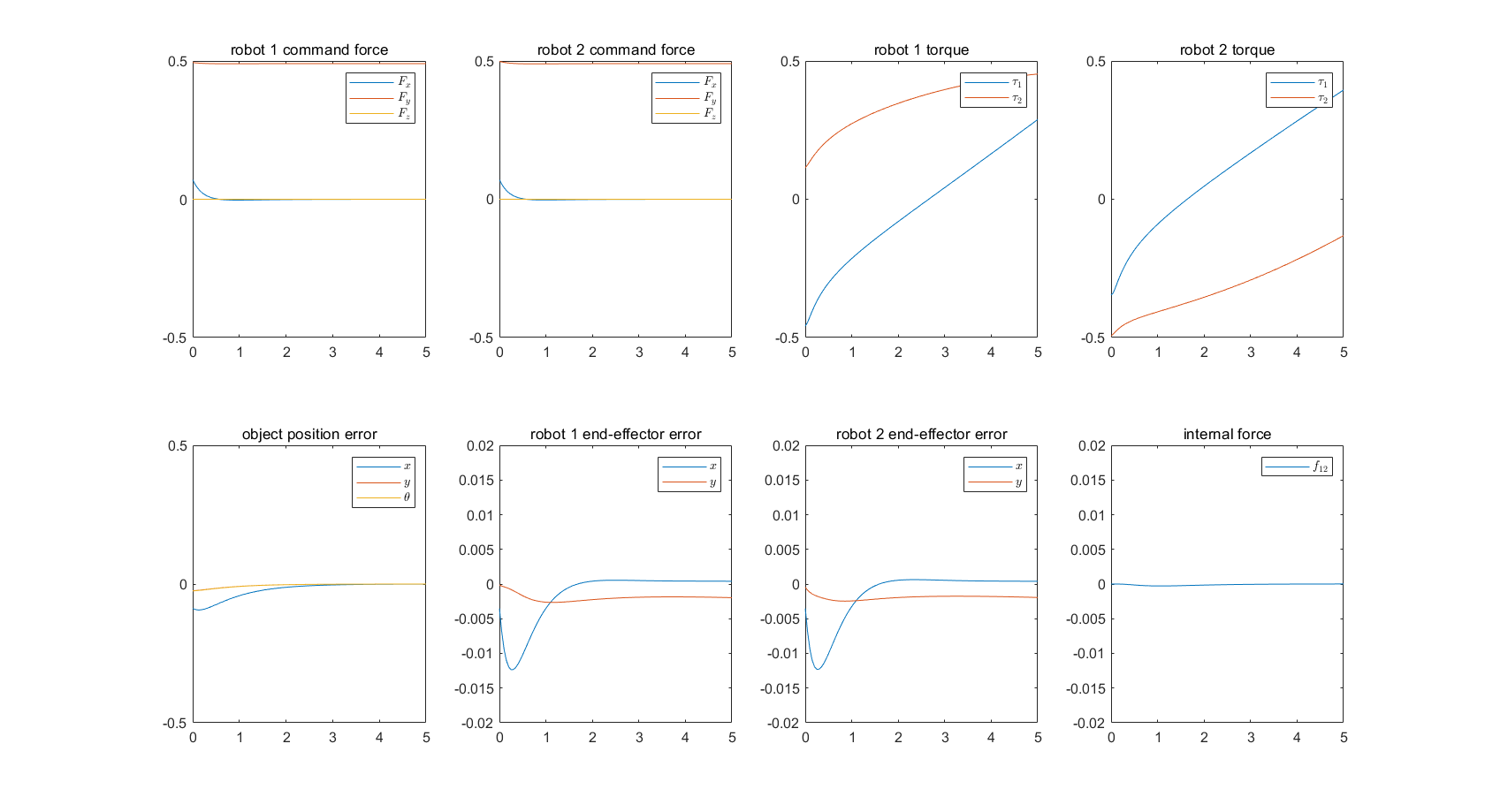
Fcmd = @(Xo,dXo,Xd) (pinv(G(Xo))*(Co(dXo)+Mo*md^-1*Fimp(Xo,dXo,Xd)')+Fint(Xo)')';
结果下图所示。
源代码
本文所需全部源代码已上传至我的GitHub,点击这里下载。与上一篇文章(机械臂协同搬运中的阻抗控制)相同,运行two_link_object.m和two_link_distributed.m即可。使用前请确认RTB已经正确安装,下载和安装说明点击这里。
如果喜欢,欢迎点赞和fork。
Williams, D., & Khatib, O. (1993). Virtual linkage: A model for internal forces in multi-grasp manipulation. In Proceedings - IEEE International Conference on Robotics and Automation (Vol. 1, pp. 1025–1030). Published by IEEE. https://doi.org/10.1109/robot.1993.292110 ↩︎